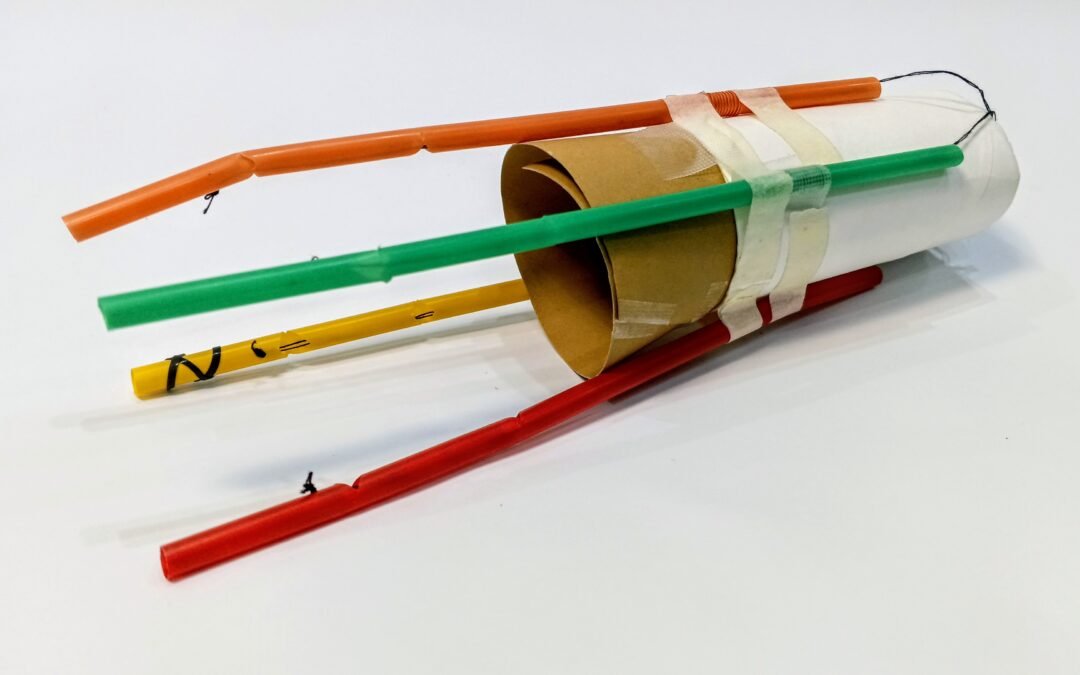
A simple engineering project where students build a working robotic hand using straws, string, and a cardboard tube. This model shows how human finger joints bend when tendons pull—perfect for learning basic biomechanics.
Difficulty Level: Medium
Concepts: Robotics, Engineering, Prosthetics
Materials List
- Plastic drinking straws
- Scissors
- Threading needle
- Strong string or thread
- Cardboard tube (to act as the wrist/arm)
- Tape
Steps
- Prepare the Straws:
Cut each straw into small segments. Make tiny notches so each segment bends like real finger joints. - Make the Fingers:
Arrange the straw pieces in a straight line and tape them lightly, keeping the joint gaps free to bend. - Add the Tendon Strings:
Thread a long piece of string through the straw segments using a needle.
This string will act like a muscle/tendon. - Attach Fingers to the Hand Base:
Tape all five fingers onto a flat piece of cardboard or directly onto the cardboard tube. - Create the Pull Mechanism:
Pass the string ends through the tube and leave them hanging out the bottom. - Test the Movement:
Pull the strings - each finger should bend like a real human finger joint. - Fine-Tune:
Adjust tension, trim excess string, and reinforce joints with small tape pieces if needed.
Science Behind It
This model shows how tendons and muscles work in your hand:
- Straw joints act like finger bones and knuckles.
- The string acts like a tendon.
- When you pull the string, the finger bends, just like your real tendons pull your bones to move your fingers.
It’s a simple way to understand biomechanics, force, and mechanical movement.
Watch the video!
Keywords: robotic hand project, diy robot hand for kids, straw and string robot hand, biomechanics experiment, tendon model activity, cardboard robotic hand, simple engineering project, stem hand model, how fingers move model, homemade robotic hand, school science fair ideas, kids engineering build, mechanical joints project, tendon finger experiment




